molto interessante! 
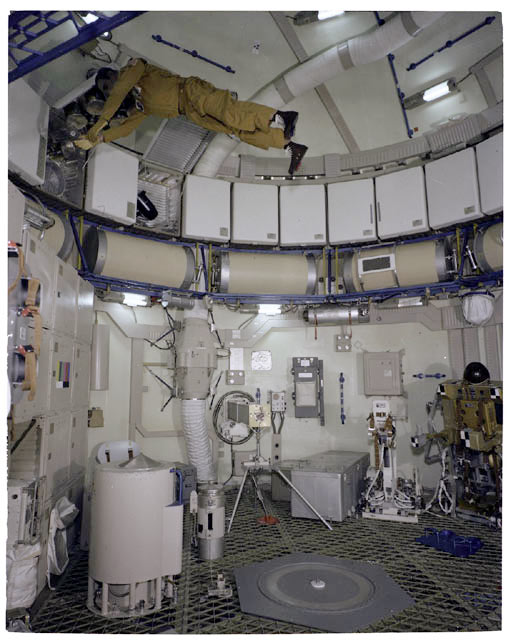
Molto interessante il nuovo modo utilizzato per alloggiare gli equipaggiamenti, e l’abbondante spazio dedicato allo stowage (abbiamo di recente discusso di questo problema a bordo dell’ISS). In effetti l’uso di ISPR ha senso in un sistema componibile come la ISS, dove gli stessi ISPR possono venire spostati da un modulo all’altro e nuovi componenti vengono aggiunti anni dopo il lancio del modulo. Ma in una missione come questa, i vantaggi della standardizzazione vengono meno rispetto alla possibilità di sfruttare il volume disponibile al meglio.
D’altro canto però una soluzione del genere significa rifare tutto daccapo, il che necessariamente comporta tempi di sviluppo aggiuntivi…
[b]Avionica[/b] Tutti i controlli avverranno, da parte dell’equipaggio tramite laptop.
E qui viene la parte “dolente”. Questo sarà completamente diverso da quello che avviene sulla ISS, in cui l’equipaggio non manda mai neanche un comando. Infatti gli astronauti potrebbero mandare comandi, ma siccome lo si può anche fare da terra si risparmia crew time mandando i comandi da terra.
In più, considerando che il livello di conoscenza degli astronauti è minore di quello di ogni singola posizione del Flight Control Team, i Laptop hanno un livello di dettaglio minore rispetto alle console in sala di controllo, e a bordo c’è anche una minore capacità di comando (non tutti i comandi sono disponibili per l’eqipaggio a bordo).
Ovviamente per una missione Deep Space le cose cambiano completamente, e di sicuro prima di implementare questa soluzione la testeranno approfittando della ISS con simulazioni a bordo.
Come già in precedenza dichiarato il sistema permette il proprio assemblaggio in LEO sia con vettori di dimensioni contenute come gli EELV, oppure con un numero minore di lanci utilizzando l’SLS.
Considerando che non c’è più lo Shuttle, mi interesserebbe capire come pensano di lanciare e di assemblare i vari moduli in orbita. Costruiscono dei Service Module ad-hoc che poi si staccano e rientrano distruttivamente in atmosfera?
Come già in precedenza dichiarato il sistema permette il proprio assemblaggio in LEO sia con vettori di dimensioni contenute come gli EELV, oppure con un numero minore di lanci utilizzando l’SLS.Considerando che non c’è più lo Shuttle, mi interesserebbe capire come pensano di lanciare e di assemblare i vari moduli in orbita. Costruiscono dei Service Module ad-hoc che poi si staccano e rientrano distruttivamente in atmosfera?
non so se è fattibile visto la vicinanza e le dimensioni dei moduli, ma potrebbero anche usare i bracci robotici della iss,oltretutto mi sembra che dovrebbe nascerne come prolungamento, o almeno questo era uno dei progetti
Si, ma anche se usassero un braccio per il berthing, MPLM come ci arriva a fare il rendez vous, e come fa ad avere controllo d’assetto durante il berthing?
ah qui colpisci la mia ignoranza ![]() pensavo che i vettori anche se non tutti a un certo punto di manovrabilità ci potevano arrivare, essendo comunque sempre tutto basato su “calcoli precisi”.
pensavo che i vettori anche se non tutti a un certo punto di manovrabilità ci potevano arrivare, essendo comunque sempre tutto basato su “calcoli precisi”.
Mi vengono in mente le missioni Apollo quando dovevano fare il docking con i Lem tra uno stadio e un altro
il CM, delle missioni Apollo, si separava dal terzo stadio, effettuava una rotazione e si univa al LM, continuando il viaggio di avvicinamneto alla Luna, nella configurazione di crociera: motore SM indirizzato verso la Luna.
Sicuramente non ho compreso il tuo pensiero, in quanto non mi sembra troppo calzante come esemnpio.
Come dice Pilgrim, nel caso di Apollo non c’era da fare nessun rendez vous. Il CM si staccava dall’insieme, si girava e si attacava al LEM. Quindi era solo il CM a fare manovre, e il resto del sistema aveva solo da stare “fermo” ad aspettare (il che implica che avesse quanto meno un attitude control).
Qui invece il caso sarebbe diverso, visto che sarebbero due lanci separati e quindi ci vorrebbe un vero e proprio rendez-vous. E se mi immagino che non sia un problema per un secondo stadio immettere il payload sull’orbita giusta, non sono sicuro che abbia abbastanza precisione per effettuare un vero e proprio rendez-vous.
Sicuramente è sbagliatissima come idea, ma lo ripeto sempre sono uno di quelli negati per le materie tecnico/scientifiche oltre allo sfuggermi di parecchi dettagli, ma mi immaginavo che alcuni vettori avessero un minimo di manovrabilità in orbita nel senso che la spinta potesse essere regolata senza “propulsori di manovra”. Una volta raggiunta la stessa orbita della iss fino ad avvicinarsi (però qua credo che si deve tener conto da dove viene lanciato e quello che puo permettere di fare ogni finestra di lancio) il docking si potrebbe fare con l aiuto di uno dei bracci robotici della iss sempre se non è troppo rischioso e quasi sicuramente a costo di reboost (certo non muovere l intera stazione al servizio di quei due moduli precedentemente attraccati).
Scusate per le bestemmie astronautiche che dico ma cerco di capire con le poche nozioni che ho ![]() (liberi di insultarmi :P)
(liberi di insultarmi :P)
Ottimo articolo Alberto!
Già, ma è proprio qui il punto dolente. Per manovrare di precisione per il rendesz-vous il modulo o MPLM o qualsiasi altra cosa ha bisogno di propulsori di manovra e di un sistema di controllo (l’insieme di questi sistemi è spesso chiamato “modulo propulsivo” o simili). E questo “modulo propulsivo” al momento non esiste e andrebbe sviluppato (da qui il dubbio di Buzz).
I vettori si limitano a porre il payload nell’orbita (più o meno precisa) approssimativa prevista. Siamo molto migliorati rispetto agli anni '60 in quanto a precisione, ma per un rendesz-vous ci vogliono ancora numerose manovre e accensioni di precisione.
Tutti gli esempi da te citati avevano a disposizione un modulo propulsivo da utilizzare per queste manovre: Apollo, HTV, ATV, etc… Perfino il modulo russo Poisk, che si è agganciato alla ISS autonomamente, utilizzava il modulo propulsivo della Progress per le manovre di avvicinamento e docking. E, come dice Buzz nei suoi post precedenti, questo non basta. Affinchè avvenga il docking anche il target deve avere un qualche sistema di guida, anche solo per offrire un bersaglio “stabile” al mezzo che si sta agganciando.
le parole chiave sono automation&autonomy
Grazie Matteo, hai riassunto perfettamente quello che volevo dire 
Ottimo articolo! 
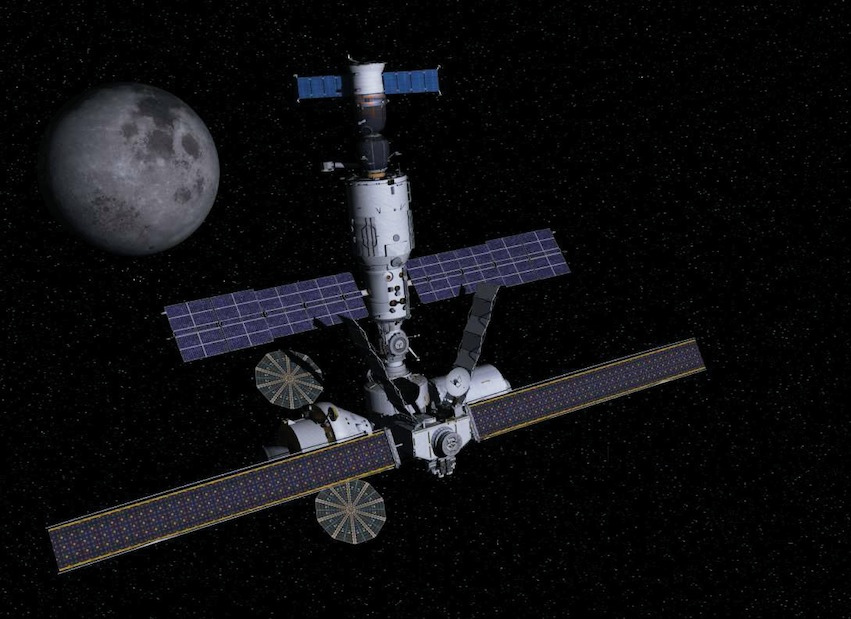
Tuttavia credo che la partecipazione internazionale sia essenziale per lo sviluppo del Deep Space Habitat, in quanto il costo della configurazione descritta e illustrata risulterebbe molto elevata. Un modulo abitativo dalle dimensioni simile al Destiny, costerebbe oltre 1 miliardo di dollari, per non parlare del Cryogenic Propulsion Stage (CPS) tutto da progettare e presumibilmente molto costo (2/2,5 miliardi di dollari). Per non parlare del tunnel di connessione e dei panelli solari. Credo che sia troppo per budget della Nasa, anche se il progetto venisse spalmato su diversi budget. Più praticabile invece utilizzare un modulo russo Zvezda per l’equipaggio a cui vengono connessi un modulo Nodo, un MPLM e successivamente un modulo gonfiabile simile al Sundancer o al BA-330. In questo modo per la configurazione da 500 giorni l’equipaggio avrebbe a disposizione maggiore spazio.
Deep Space Habitat

Possibili alternative
oppure

Speriamo che altri partner internazionali siano più interessati alla superficie lunare, rispetto agli americani.
Si, è attualmente previsto l’utilizzo di un piccolo modulo di servizio per il trasferimento dei moduli fino alla ISS, da quel che ho capito viene preso come termine di riferimento il Boeing Docking Hub, ma non essendo parte del progetto, credo venga considerata “tecnologia acquisita” e possa essere utilizzato materiale quasi-COTS.
Scusa ma su cosa hai basato queste cifre? Mi sembrano davvero esagerate se parliamo delle strutture… il CPS inoltre non verrebbe sviluppato per questo progetto, fa parte del programma SLS.
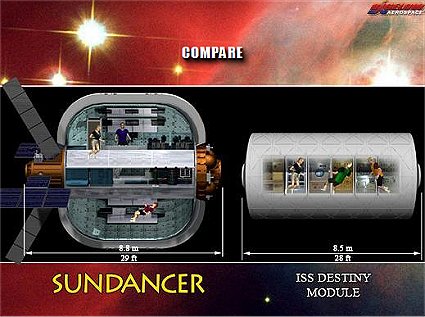
Più praticabile invece utilizzare un modulo russo Zvezda per l'equipaggio a cui vengono connessi un modulo Nodo, un MPLM e successivamente un modulo gonfiabile simile al Sundancer o al BA-330. In questo modo per la configurazione da 500 giorni l'equipaggio avrebbe a disposizione maggiore spazio.
Non sono d’accordo… la Russia non riesce nemmeno a mandare sulla ISS il modulo MLM, che è appunto della stessa famiglia del Zvezda e che è praticamente pronto da anni dopo essere stato riciclato n volte… figuriamoci costruirne uno ex-novo nel giro di pochi anni (con tutte le complessità legate ad una collaborazione internazionale e alle tempistiche di sviluppo…). Consideriamo inoltre che il volume interno sarebbe nettamente minore rispetto ad un modulo Destiny-like… Per il modulo “Made in Bigelow” sarebbe senz’altro fattibile, ma sorgerebbero altri problemi, come l’allestimento interno, la protezione dalle radiazioni e il rischio di sviluppo nettamente maggiore rispetto un modulo che ha già volato e conosciuto…
Infatti, é probabile che gli elementi gonfiabili Bigelow non saranno presi in considerazione se non dopo un “collaudo” costantemente abitato (in LEO) di almeno qualche anno. IMHO i due prototipi in orbita dimostrano la bontà del progetto di base ma da qui all’uso manned in versione deep space, credo sia un po’ prematuro (sempre che Bigelow non chiuda prima per problemi finanziari).
Scusa ma su cosa hai basato queste cifre? Mi sembrano davvero esagerate se parliamo delle strutture... il CPS inoltre non verrebbe sviluppato per questo progetto, fa parte del programma SLS.
Non sono esagerate, perché il modulo Destiny è costato 1,38 miliardi di dollari. Secondo te un modulo così complesso come quello che viene descritto nell’articolo quanto potrà costare? Onestamente non meno del Destiny, questo è certo.
www.spaceandtech.com/spacedata/platforms/iss-destiny_sum.shtml
Non sono d'accordo... la Russia non riesce nemmeno a mandare sulla ISS il modulo MLM, che è appunto della stessa famiglia del Zvezda e che è praticamente pronto da anni dopo essere stato riciclato n volte... figuriamoci costruirne uno ex-novo nel giro di pochi anni (con tutte le complessità legate ad una collaborazione internazionale e alle tempistiche di sviluppo...). Consideriamo inoltre che il volume interno sarebbe nettamente minore rispetto ad un modulo Destiny-like...
Su questo concordo con te. I russi parlano, parlano e poi… poco o nulla. Infatti la proposta del modulo russo Zvezda era una variante nel progetto e visto il problema dei finanziamenti e della teppistica, l’unica soluzione sarebbe che la Nasa lo finanziasse.
Per il modulo "Made in Bigelow" sarebbe senz'altro fattibile, ma sorgerebbero altri problemi, come l'allestimento interno, la protezione dalle radiazioni e il rischio di sviluppo nettamente maggiore rispetto un modulo che ha già volato e conosciuto...
Sicuramente sia i tecnici che gli ingenieri della Nasa e della Bigelow avranno già preso in considerazione il problema della protezione dalle radiazioni. E in qualche modo delle soluzioni verrano formulate. Per quanto riguarda l’allestimento, credo che un eventuale modulo Bigelow sarà spartano e servirà solo come modulo “ricreativo” dove svolgere esperimenti, mentre sarà il MPLM ad fungere da modulo abitativo.
Nel caso in cui il modulo Bigelow, fungesse da modulo abitativo, l’allestimento potrà essere così…
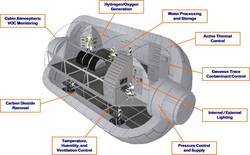
oppure
Sul Cryogenic Propulsion Stage, è vero che fa parte del progetto SLS, ma per ora è solo sulla carta e da qui alla sua realizzazione ne passerà di tempo. Per ora, non c’è neanche una indicazione temporale di quando si incomincerà a costruire il “Core Stage” del SLS, figuriamoci avere certezze sul Cryogenic Propulsion Stage.
Infine, io non sono contrario al progetto e non importa la configurazione che avrà alla fine, basta che in qualche modo venga realizzato. Tutto qui. ![]()
Bello il modulo Bigelow. Finalmente una stazione spaziale che non assomiglia a un corridoio stretto. La ISS é un tubone al confronto.
Però lo schermo a disco antiradiazioni con acqua di 10 cm di spessore dovrebbe crescere notevolmente di diametro, e quindi di peso, e quindi… mah