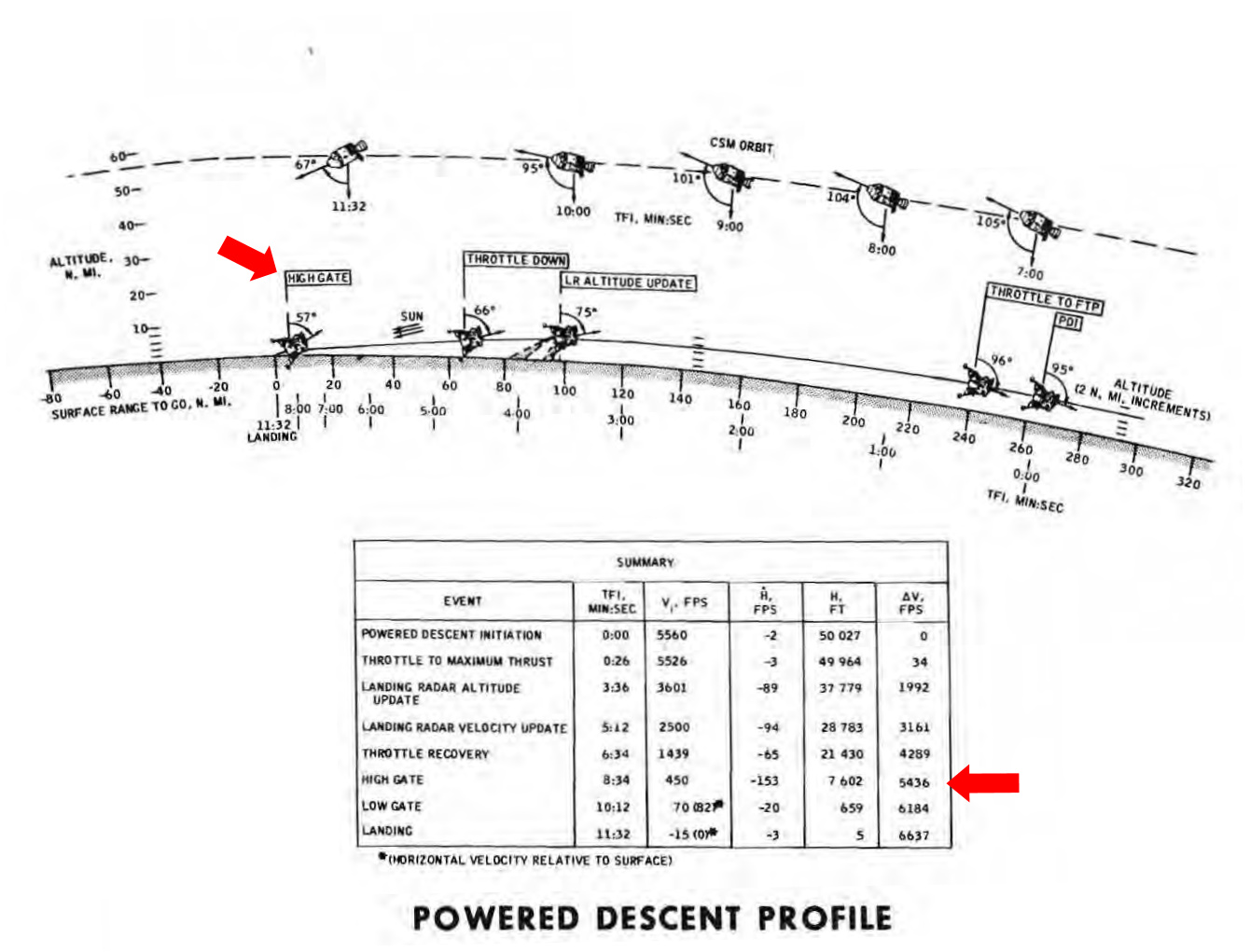
Come è noto, durante la missione Apollo 14, tra i problemi che Shepard e Mitchell incontrarono nel corso della discesa sulla superficie lunare, ci fu un’apparente avaria del radar di atterraggio. Il dispositivo generalmente entrava in funzione ad un’altezza di 10.000 metri ed era ritenuto vitale dai tecnici della missione; in sua assenza il computer avrebbe potuto contare solo sui dati ricavati dalla sua posizione orbitale, non abbastanza precisi per un’operazione delicata come l’allunaggio. Proprio per questo una delle Regole della Missione, imponeva di annullare la discesa, nel caso il radar non fosse entrato in azione entro i 4.000 metri. Mentre il LM Antares si stava pericolosamente avviciando a tale limite, da Huston escogitarono una soluzione altamente “tecnologica”: spegnere e riaccendere l’interruttore del radar. Il reset funzionò: dopo poco il radar iniziò a fare il suo lavoro, conducendo gli astronauti ad uno dei più precisi allunaggi della storia.
La soluzione del problema-radar diede sicuramente un grande sollievo agli occupanti del LM; alcuni giorni dopo la missione, durante il Technical Debrief, il comandante diceva ancora, con trasporto: “Non rigrazierò mai abbastanza il personale di terra per quell’indicazione”. Eppure nella sua ultima intervista (chi non l’ha ancora letta può trovarla qui: http://www.forumastronautico.it/index.php?topic=23864.0) Shepard dichiarò, un po’ sfrontatamente, che avrebbe portato a termine l’atterraggio, anche senza radar.
La battuta non può essere archiviata appellandosi semplicemente alla indubbia spavalderia degli astronauti della prima generazione, anche perché trova conferma nel racconto del suo copilota. In The Way of the Explorer Mitchell, pur smentendo il dialogo riferito da Al, ricorda che, a causa del problema con il pulsante di abort incontrato in precedenza, stavano procedendo in modalità di abort manuale, non automatico:
Per annullare l'allunaggio avremmo dovuto, come primo passo, girarci in avanti [in quella fase della discesa il LM procedeva coricato, con le zampe in avanti], e lì davanti a noi ci sarebbe stato il sito di atterraggio, proprio come l'avevamo visto durante le simulazioni. Il computer di guida era efficiente anche senza radar di atterraggio. Senza dubbio, avremmo proceduto.
Avebbero proceduto verso quale esito? Era possibile allunare senza il radar?
La questione ha vari aspetti e non vorrei, per ora, toccare il problema della possibilità da parte degli astronauti di infrangere le Regole della Missione e delle conseguenze professionali di una simile scelta. Mi interessa anzitutto capire la questione dal punto di vista tecnico. Era tecnicamente possibile allunare senza radar?
Evidentemente non sono il primo che si interroga su questo punto, perché ho trovato, il medesimo quesito sul forum di collectSPACE, in un post di ben 8 anni fa. Gli intraprendenti membri di quel forum non si sono limitati a speculare (molti interventi sottolineano tra le altre cose la seria difficoltà di valutare visivamente le distanze in assenza di atmosfera), ma hanno adirittura interpellato gli astronauti. Qualcuno aveva già scritto al medesimo Mitchell che, nella sua email di risposta, oltre ad affermare cose simili a quelle che abbimo già citato, aggiungeva:
Se ciò fosse successo [ovvero: se avessimo raddrizzato il LM come richiesto dalla manovra di abort], avremmo osservato il sito di atterraggio e il [i]Cone Crater[/i] esattamente dove avrebbe dovuto essere. Eravamo nell'esatta traiettoria e il radar di atterraggio, quando finalmente si è attivato, non ha cambiato per niente il nostro vettore di stato [ossia le informazioni relative alla posizione del veicolo]. Non c'era dubbio, allora o adesso, che avremmo proceduto all'atterraggio. Non ne avremmo nemmeno discusso. D'altra parte non c'erano alte montagne vicino al nostro sito e sulla nostra traiettoria; relativamente ad Apollo14 l'intera questione era più accademica che reale, il che non sarebbe stato per i voli successivi su un terreno più elevato.
Un altro l’ha chiesto personalmente a John Young [grazie, Vittorio, per la precisazione], secondo il quale era sufficiente l’indicazione visiva offerta dall’ombra del LM:
Non c'era davvero bisogno dell'indicazione dell'altitudine da parte del radar per atterrare, bastava guardare l'ombra che veniva giù verso di te e potevi valutare quanto eri veloce, e, siccome le gambe erano ampie 10 metri, potevi vedere quanto grandi erano i crateri.
Ma, a bassa quota, la polvere lunare sollevata dal motore non avrebbe reso impossibile la discesa a vista, creando uno “schermo” tra il pilota e la superficie? Questo poteva probabilmente essere un problema, ma, nel caso di Apollo 14, il luogo dell’atterraggio presentava condizioni favorevoli, come testimonia lo stesso Shepard:
Credo che abbiamo avuto meno problemi con la polvere delle precedenti missioni. Penso che sia perché [...] la superficie dell'area in cui siamo atterrati era meno polverosa, a parte la polvere intorno al bordo dei crateri. L'area generale sembrava avere meno polvere e non abbiamo certamente avuto alcun problema con la polvere al momento del contatto finale. [...] La polvere era evidente, ma si potevano vedere le rocce anche attraverso la polvere.
E allora? Se tutte queste testimonianze convergono in una stessa direzione, non mi spiego affermazioni di tutt’altro tenore che ho trovato in vari altri luoghi. Ad esempio sulla Wikipedia inglese, alla voce Apollo 14 si trova, putroppo senza nessuna fonte citata a supporto:
Mitchell ritiene [e noi sappiamo che lo diceva anche Alan] che Shepard avrebbe continuato con il tentativo di atterraggio, senza il radar, utilizzando il sistema di guida inerziale del LM e i riferimenti visivi. Ma un esame post-volo dei dati della discesa ha mostrato che il solo sistema inerziale sarebbe stato inadeguato e che gli astronauti, probabilmente, sarebbero stati costretti ad annullare l'atterraggio mentre si avvicinavano alla superficie.
Ben più grave è trovare quanto segue in quella che per me su Apollo è una “bibbia”:
Molti si sono chiesti se [Shepard] avrebbe tentato un atterraggio senza il radar. I più credono che se ci avesse provato, i ristretti margini di carburante lo avrebbero costretto ad annullare la manovra un po' più in basso.
Anche qui non è dato di sapere chi siano “i molti” e chi siano “i più”.
Mi appello perciò al forum. Che cosa pensare? Verrebbe spontaneo fidarsi degli astronauti, ma perché voci anche autorevoli dicono il contrario?
Qualcuno, tecnicamente più preparato di me (non ci vuol molto) è in grado di dimostrare perché, violando le Mission Rules, i due di Antares sarebbero andati incontro ad un abort posticipato, finendo il carburante? Perché Mitchell dice che il vettore di stato era perfetto e altri sostiene che il sistema di guida inerziale era inadeguato?
C’è tra noi chi mi sa indicare dove trovare spiegazioni (non solo affermazioni) in merito?
Ringrazio anticipatamente chiunque vorrà contribuire a chiarirmi questo “mistero”. Magari mi risparmio di scrivere a Woods… ![]()
Per chi volesse approfondire, il post di collectSPACE citato è questo: http://www.collectspace.com/ubb/Forum29/HTML/000812.html
Il Technical Debrief e le Mission Rules sono sul sito dell’Apollo 14 Lunar Surface Journal: http://history.nasa.gov/alsj/a14/a14.html
L’articolo di Wikipedia è questo: https://en.wikipedia.org/wiki/Apollo_14

")