ISS e dintorni - 01
LOCAD-PTS
C’é qualche Trekker la fuori?
Ricordate il Tricorder, usato da McCoy e Mr. Spock? Se ne sono serviti per esplorare “strani nuovi mondi … dove nessuno è mai giunto prima”.
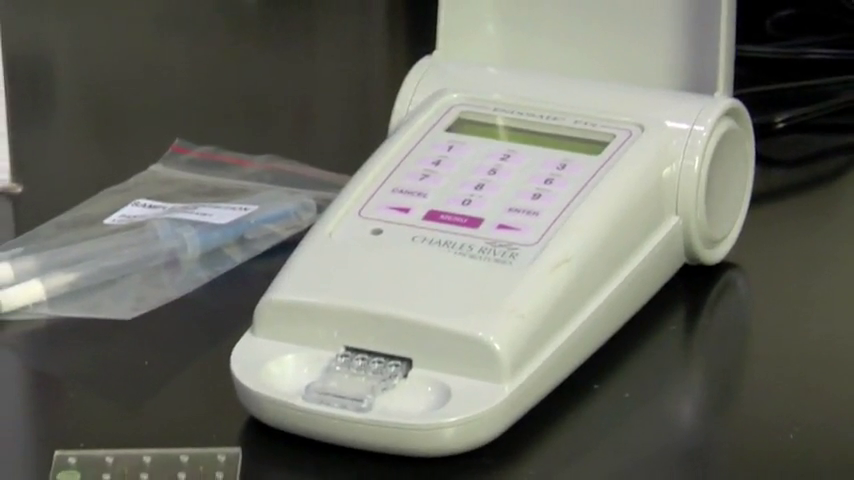
Ebbene, a bordo della Stazione Internazionale, gli astronauti da qualche tempo stanno utilizzando uno strumento sperimentale sorprendentemente simile al Tricorder: il LOCAD-PTS, abbreviazione di “Lab-on-a-Chip Development System Test Application Portable”. Questa sorta di mini laboratorio portatile é il primo passo verso lo sviluppo di qualcosa di simile allo strumento usato da McCoy.
Il LOCAD come il Tricorder, é portatile, é rapido ed é in grado di individuare molecole biochimiche, ci dice Heather Morris del NASA Marshall Space Flight Center (un fan di Star Trek). Però é anche vero che se il Tricorder può fare quasi tutto, il LOCAD é maggiormente specializzato e al momento é specificatamente progettato per individuare microbi e funghi.
Come afferma Norm Wainwright, ricercatore principale per LOCAD-PTS, “L’equipaggio della Stazione ISS lavora duramente per mantenere un certo livello di pulizia e il nostro strumento dice loro dove concentrare il loro sforzo”. I test di controllo sono molto semplici, l’astronauta strofina la superficie di suo interesse con un piccolo tampone asciutto poi, sciacqua con acqua sterile il tampone, convertendo quindi il materiale da esaminare in una forma liquida, quindi si mette qualche goccia nel ricettacolo del LOCAD. Lo strumento impiega meno di 15 min per emettere il suo verdetto, a dispetto dei metodi standard di coltura di laboratorio che possono impiegare anche alcuni giorni.
Durante il Marzo del 2007, l’astronauta Sunita Williams ha dimostrato le capacità di LOCAD rilevando batteri di tipo Gram negativi nel Nodo-1 e nel modulo US-Lab.
Poi, nei mesi di Giugno e Settembre del 2008, l’equipaggio della ISS ha testato una nuova cartuccia rilevatrice, progettata per individuare i funghi. La prima prova con questa nuova cartuccia é stata eseguita in Nodo-1, ma dei funghi nemmeno l’ombra. La notizia invece di accendere gli entusiasmi ha lasciato i ricercatori con il muso lungo per non essere riusciti a testare completamente le capacità di scoperta della cartuccia.
Così ci ha dovuto pensare Sandra Magnus ad inventarsi qualcosa, ed era quasi convinta di avercela fatta quando ha creduto di andare a colpo sicuro, individuando i punti di vincolo in cui si infilano i piedi (per tenersi fermi in microgravità), come luogo perfetto per trovare tracce di funghi.
Ma niente da fare, era tutto “pulito”.
Come un’esploratore determinato a tutto, Sandra si é quindi spostata nell’area palestra concentrandosi questa volta sulla cyclette e sul tapis roulant. I due attrezzi sono fonte di sudore e strofinando i tamponi su diverse superfici degli attrezzi, la ricerca di Sandy é stata premiata. Il LOCAD ha individuato una nutrita colonia di funghi là dove alcuni componenti delle attrezzature sono spesso a contatto con parti sudate del corpo umano.
Jacke Maule (principal investigator for LOCAD Exploration): “ovviamente i funghi non ponevano nessuna preoccupazione per la salute dell’equipaggio, ma é stato un grande risultato scientifico. Negli anni a venire, la pulizia dei veicoli spaziali sarà critica anche per altre ragioni, perché uno degli obiettivi della NASA oltre a consolidare l’orbita bassa terrestre, sarà quello di prepararsi alla ricerca della vita su Marte”.
E’ un dato di fatto che gli esseri umani, ovunque vadano si portano appresso un sacco di microbi. I biologi stimano che ogni corpo umano trasporta con se miliardi di microbi e che essi rappresentano, pensate, ben il 2% della massa totale di una persona. Vero che la maggior parte vive in simbiosi con noi e sono pure utili, ma molti altri possono fare decisamente male. In ogni caso non dovrebbe essere loro consentito di inquinare i campioni marziani, e a dirla tutta, sarebbe anche poco simpatico portare dentro l’astronave forme di vita sconosciute.
“L’equipaggio avrà quindi bisogno di un sistema per monitorare se stesso prima e dopo l’attività EVA”, spiega Maule e “il LOCAD è l’ideale per questo scopo, per il quale é stato testato a lungo anche in laboratorio a Terra”. Non solo, il team di ricercatori LOCAD ha allestito numerosi test all’interno dell’US Airlock che fa da interfaccia con l’habitat della Stazione e lo Spazio esterno, e l’ambiente a onor del vero é stato trovato abbastanza “pulito”, l’unica parte maggiormente compromessa é stato proprio il maniglione d’ingresso dell’Airlock, che ospitava batteri Gram negativi. E la presenza di batteri sul maniglione della camera di compensazione rappresenterebbero un problema, se i membri dell’equipaggio fossero stati in procinto di uscire per un giretto sulla superficie di Marte. In ogni caso le sperimentazioni con il LOCAD sono solo all’inizio e c’é ancora molto lavoro da fare.
Oltre a rilevare batteri Gram negativi come l’Escherichia Coli e la Salmonella, il LOCAD come si diceva individua anche i funghi che, come ben sanno i russi dopo l’esperienza sulla Stazione MIR, non vanno molto d’accordo con la componentistica elettronica di bordo e sono quindi anch’essi ospiti sgraditi. Inoltre a breve sarà disponibile anche una cartuccia per individuare i batteri Gram positivi, come lo Stafilococco e Streptococco.
In definitiva, ci dice Morris, "vorremmo creare cartucce per tutti i tipi di microrganismi e composti chimici. Ci piacerebbe inoltre poter essere in grado di mettere a punto un sistema per capire cosa “non funziona” in un astronauta qualora si ammalasse.
Lisa Monaco, scienziato LOCAD, aggiunge la sua visione del futuro: “Quello che stiamo sviluppando al MSFC non ha ovviamente l’obiettivo di servire la ISS ma bensì le missioni lunari, i soggiorni di lunga durata su altri pianeti e ovviamente avere un suo pratico anche qui, sulla Terra.”
Pensate, il sofisticato LOCAD utilizza gli enzimi del sistema immunitario del Limulo (Horseshoe Crab). Strano ma vero, tutta questa abilità di individuazione la si deve essenzialmente ad un essere vivente vecchio di 300 milioni di anni. Il Limulo nella sua costituzione é rimasto infatti tale e quale a quando é comparso milioni di anni fa, al punto di essere classificato come fossile vivente. Questo parente dei granchi (ma sembra sia più un parente dei ragni) vive in acque poco profonde, lungo le coste orientali degli Stati Uniti.
Il suo sistema immunitario sebbene molto primitivo ha notevoli capacità di identificazione ed un’estrema sensibilità nell’individuare microbi indesiderati. Viene infatti utilizzata una cascata di enzimi che viene attivata dalle endotossine, un componente della parete cellulare dei batteri Gram negativi. Mentre un’altra porzione della cascata di enzimi del Limulo viene specificatamente attivata dal Glucano, in questo caso un componente che costituisce l’involucro cellulare dei funghi.
I Limuli vengono raccolti, puliti e preparati per la raccolta del sangue (le creature non vengono danneggiate o uccise e successivamente sono poi rilasciati nelle lagune d’origine… con un po’ meno sangue nel corpo). Inoltre, il sangue dei Limuli che sostanzialmente é incolore ha la particolarità di assumere il colore blu, nel momento in cui si ossida a contatto con l’aria.
… Dr. McCoy, stiamo arrivando
LOCAD personnel:
Mike Effinger of NASA’s Marshall Space Flight Center is the LOCAD project manager.
Norm Wainwright, principal investigator for LOCAD-PTS, is also director of research and development at Charles River Laboratories in Charleston, SC.
Jake Maule is the principal investigator for LOCAD Exploration, and LOCAD-PTS project scientist, based at British Aerospace Systems.
Lisa Monaco, researchers at NASA’s Marshall Space Flight Center (MSFC).
fonti:
www.nasa.gov
http://locad.nasa.gov
http://science.nasa.gov
In allegato, il documento in PDF con alcune altre note



ISS-e-dintorni_01.pdf (376 KB)