Buongiorno, ho una curiosità, mi scuso se è una domanda troppo semplice.
Ma come si fa a sapere esattamente la traiettoria di una sonda da distanza e velocità? Per esempio come si fa a sapere con sicurezza che è nell’orbita di Marte senza GPS o altri punti di riferimento?
O quando la sonda deve accendere i razzi per aggiustare l’orbita e soprattutto per quanto tempo e che manovra deve essere fatta?
Mi sembra miracoloso che si possa guidare una sonda lontana milioni di km senza punti di riferimento visivi o triangolazioni radio.
Sapere la distanza ci permette di conoscere la posizione su un cerchio, ma sapere esattamente in che punto del cerchio si trova… Ok che una volta uscita dall’atmosfera terrestre e spenti i motori dovrebbe seguire l’orbita calcolata, ma credo che non tutto possa essere calcolato precisamente, ci sarà qualche margine di errore o qualche perturbazione al moto possibile e non prevedibile…
Scusate ma questa cosa mi sembra un miracolo e mi affascina parecchio.
Grazie
Intanto rispondo a questa domanda, ma piano piano riceverai risposte a tutto.
Per sapere che è effettivamente in orbita e calcolare il periodo dell’orbita, c’è un trucchetto molto semplice, che si può fare anche da casa, in teoria. Si sfrutta quello che si chiama effetto doppler. La sonda trasmette un segnale a una frequenza fissa, ma a causa della velocità relativa rispetto alla Terra, questo segnale può leggermente variare la sua frequenza.
È lo stesso effetto di quando si sente la sirena della polizia in modo diverso quando l’auto corre verso di noi e quando ci ha superato e corre lontano da noi.
Analizzando le frequenze ricevute, se la sonda è in orbita, si misurerà una frequenza maggiore di quella di trasmissione quando la sonda si muove verso di noi e minore quando si allontana. Il tempo misurato di quanto varia questa alternanza di frequenza è esattamente il periodo orbitale, cioè il tempo che la sonda impiega a compiere un’orbita attorno a Marte.
Questo non è necessariamente il metodo che hanno usato, ma secondo me il metodo migliore per spiegare come fare analisi della velocità di una sonda remota senza strumenti di controllo nelle vicinanze.
Sinceramente al momento non ti so dire i metodi di rilevazione di posizione e velocità usati per le tre sonde che sono arrivate nei pressi di Marte questo mese, ce ne sono svariati.
Sono sicuro che qualcun altro interverrà nel frattempo, ma durante la settimana avrò più tempo per risponderti con più precisione.
Benvenuto!
Però la traiettoria di massima la conosci perché l’hai decisa al lancio.
Se poi misuri la distanza più volte (anche tenendo conto del fatto che la Terra si sposta nel frattempo) hai ulteriori dati con cui stimare la posizione.
La distanza la puoi misurare sia passivamente via radar che attivamente con il tempo che ci metti a inviare un segnale alla sonda e quello che ci mette ad arrivare la risposta della sonda.
Inoltre se si integrano (nel senso matematico del termine) i dati degli accelerometri che arrivano con la telemetria, teoricamente si conoscerebbe la posizione esatta.
Per determinare la posizione esistono svariato tecniche, ognuna delle quali migliora la precisione della misura di un cero fattore. Per una sonda non è necessario sapere la posizione precisa al km, anzi, spesso l’errore è molto grande, si tratta di decine, centinaia o di migliaia di chilometri, a seconda dei requisiti richiesti dalla missione. Ogni misura effettuata costa infatti un bel po’ di soldi, che vanno a influire sul budget di missione (per lo più utilizzo di antenne dal diametro superiore ai 30 metri).
Alcune sonde sono dotate di un sistema ottico a bordo. Guardano il cielo e capiscono orientativamente posizione e assetto (un po’ come si è visto in Apollo 13 quando hanno fatto la correzione di orbita in modalità manuale puntando la Luna nel finestrino).
Un metodo più complesso e preciso per analizzare la posizione angolare di una sonda è il VLBI, very long baseline interferometry. Allego l’immagine del sito linkato qui:

Si usa per localizzare la posizione angolare (non distanza) di una sorgente radio qualunque, quasar nell’esempio, ma anche sonda robotica va bene. Il segnale deve essere ricevuto e analizzato contemporaneamente da almeno due antenne terrestri relativamente lontane. Lo sfasamento dell’arrivo dell’onda elettromagnetica da un’informazione sulla posizione angolare dell’oggetto che la trasmette. Ripetendo la misura a distanza di ore, si effettua una nuova rilevazione con le antenne riceventi posizionate in maniera differente, a causa della rotazione terrestre, e si migliora la stima della posizione.
In generale si usano diverse metodologie, ognuna delle quali permette di migliorare la precisione. Come riferimento principale per il calcolo si usa, come hai detto tu, i calcoli utilizzati per determinare l’orbita.
Esatto.
Tutte le sonde sono equipaggiati con sensori solari e stellari (sun and star trackers) che sono fondamentali per determinare assetto (come è orientata la sonda) e la posizione (dove si trova la sonda), in genere sono presenti anche dei giroscopi.
A bordo sono inoltre presenti degli accelerometri che tra l’altro servono a misurare la velocità angolare fondamentale nel caso di un’orbita.
Per cui oltre al sempre valido metodo basato sull’effetto Doppler (dal nome del suo scopritore Christian Andreas Doppler nel 1845), come si vede si utilizza un mix di strumenti per determinare la propria posizione.
Quanto all’Apollo CM l’intera suite di navigazione, chiamata PGNCS (Primary Guidance, Navigation, and Control System) era stata ideata e realizzata dal MIT (Massachusetts Insitutre of Technology) sotto la guida del grande Stark Draper tra i quali spiccava la Optical Unit, composta da una coppia di lenti con due distinte linee di vista, 28X di ingrandimento e 1,8° di campo di vista. Tale unità si comportava essenzialmente come la versione (sofisticata e moderna) di un sestante nautico, il cui scopo è sostanzialmente quello di misurare angoli, tra le varie stelle, la Terra, la Luna rispetto ad alcuni punti di riferimento come l’orizzonte.
Mentre il Lunar Module (LM) era equipaggiato con lo AOT (Alignament Optical Telescope) il quale era sostanzialmente un periscopio che serviva durante le fasi di avvicinamento ed aggancio tra lo stadio di ascesa dello LM e l’Apollo CSM.
Quello che si vede nel film Apollo 13 è sostanzialmente l’uso dei traguardi ottici graduati (concettualmente simili agli HUD degli aerei da caccia) posizionati sugli oblo sia dello LM sia del CM i quali servivano come aiuto nelle fasi di avvicinamento ed attracco. Essendo inutilizzabile la Optical Unit a bordo del modulo Odissey (avevano ridotto al minino l’utilizzo di energia) per le manovre correttive erano ricorsi ai traguadi ottici di Aquarius utilizzati come rudimentali sestanti.

Optical Unit dello Apollo CM
 ù
ù
Optical Unit smontata

Apollo AOT

Apollo Crewman Optical Alignament Sight
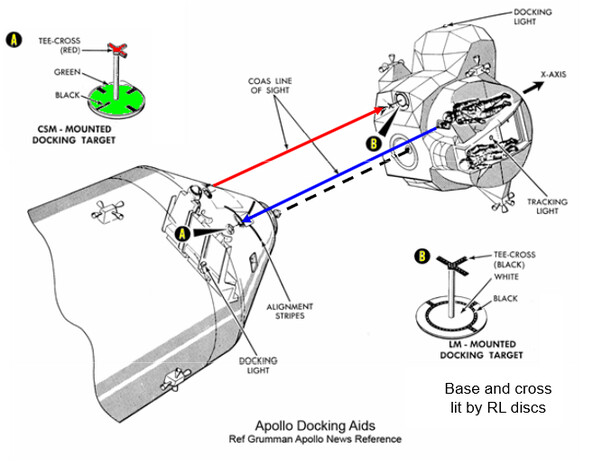
Allineamento ottico tra Apollo CSM e LM
I sensori stellari riescono a misurare anche la posizione del veicolo o solo l’assetto?
Si gli star tracker sono comunemente utilizzati anche per la determinazione dell’assetto (specie se su tre assi), naturalmente i giroscopi sono sempre utili soprattutto nel caso di assetti spinnati (rotazione intorno ad un asse).
A tal proposito segnalo un interessante paper, a firma dei Sud- Coreani J. Wang e J. Chun, uscito sul Journal of Guidance, Control and Dynamics (vol. 26, Nov-Dec 2006):
Attitude Determination Using a Single Star Sensor and a Star Density Table
https://arc.aiaa.org/doi/abs/10.2514/1.17249?journalCode=jgcd
L’articolo è a pagamento e non riesco a capire se spiega come determinare solo l’assetto del veicolo usando i sensori stellari o anche la posizione nello spazio rispetto a un sistema di riferimento, per esempio la Terra.
Ok, la spiegazione (in termini semplici) è reperibile presso il seguente link ESA:
https://artes.esa.int/news/star-tracker-astrogyro-builds-market-attitude
In particolare:
Star trackers’, or star sensors, are used on satellites to determine the precise orientation or ‘attitude’ of the spacecraft in relation to the stars. The star tracker measures the position of many stars and compares it to a star catalogue, allowing the attitude of the spacecraft to be calculated.
Although these star tracker sensors are used for the attitude and orbit control systems of spacecraft, they have temporary outages when ‘dazzled’ by strong light sources such as the sun, or the sun’s reflection off parts of the spacecraft. Star trackers therefore work in tandem with gyroscopes, as the latter provide temporary, albeit less accurate, attitude information during star tracker outages. Together, star trackers and gyros ensure that the satellite’s attitude is always known.
State-of-the-art attitude determination systems for telecom spacecraft typically use two star trackers along with gyroscopes, which are separate units on board the spacecraft. The main spacecraft computer is then tasked to process the star tracker and gyro data.
Dunque come dicevo prima, l’assetto (attitude) di un veicolo spaziale può essere calcolato in base alla posizione relativa di un certo numero di stelle (più lontane sono meglio è), di seguito avviene la comparazione con i dati di un catalogo disponibile a bordo. Poi avviene l’incrocio dei dati con quelli provenienti dai giroscopi di bordo per la verifica definitiva dell’assetto.
La posizione si può determinare con il sistema ottico solo in prossimità di un corpo celeste, ad esempio in orbita. In viaggio nel sistema solare, nello spazio interplanetario, la posizione dei corpi celesti non cambia.
Inoltre gli accelerometri in orbita sono inutili. Servono solo durante l’accensione dei motori. Non possono misurare la velocità angolare dell’orbita quando forza di gravità e accelerazione sono uguali, non hanno nessuno stimolo (differenza) da misurare (esempio un oggetto sulla stazione spaziale).
Ok grazie. Però non intendevo la posizione delle stelle in cielo ma la posizione del veicolo nello spazio, per esempio la distanza dalla Terra e un vettore direzione da un osservatore a terra.
Mi autocito.
Allora stiamo parlando di posizione e non di assetto.
In questo caso lo il sensore stellare assolve in pieno alla propria funzione di “sestante” (https://it.wikipedia.org/wiki/Sestante) in cui misura gli angoli tra stelle (più lontane sono e meglio è) le confronta sempre con il catalogo di bordo per ottenere sia la propria posizione nello Spazio sia il vettore di velocità (nonché la direzione) verso cui si sta muovendo.
Il discrimine tra quale sia lo strumento più efficace per determinare posizione, velocità e direzione è in sostanza il livello di precisione richiesto.
Ad esempio, anche se non si tratta di una sonda in viaggio nello spazio profondo, il livello di precisione richiesto per la determinazione dell’orbita di Gaia attorno ad L2 passa proprio da una tecnica VLBI chiamata Delta-DOR.
Come anticipato da @Vespiacic, ESA usa due delle tre stazioni da 35 metri di ESA distanti tra loro per seguire simultaneamente il segnale radio della sonda, al fine di misurare il ritardo tra i segnali che arrivano alle due stazioni. La tecnica per misurare questo ritardo è denominata DOR (Differential One-way Range).
Teoricamente, il ritardo dipende solo dalle posizioni delle due antenne e della sonda. Tuttavia, in realtà, il ritardo è influenzato da diverse fonti di errore: ad esempio, le onde radio che viaggiano attraverso la troposfera, la ionosfera e il plasma solare e le instabilità dell’orologio atomico posto nella stazione ricevente di terra.
La tecnica Delta-DOR corregge questi errori tracciando oggetti astronomici come i quasar (nuclei galattici attivi), in particolare scegliendone uno che sia prospetticamente vicino al veicolo spaziale (normalmente entro i 10º), in modo che i percorsi del segnale delle due sorgenti attraverso l’atmosfera terrestre siano simili. La posizione del quasar prescelto è già nota in modo estremamente accurato tramite misurazioni astronomiche, tipicamente superiori a 50 miliardesimi di grado (un nanoradiante).
In linea di principio, il tempo di ritardo del quasar viene sottratto da quello del veicolo spaziale per fornire la misurazione delta-DOR (il simbolo greco “delta” è comunemente usato per indicare “differenza”). Il ritardo viene convertito in distanza moltiplicando per la velocità della luce ed effettuando semplici calcoli trigonometrici
In questa immagine (C) ESA si illustra bene questa tecnica.

P.S.
Per una missione un altro fattore da considerare è il costo di queste misurazioni. Gaia, per esempio, effettua ascolti “delta door” prenotando due stazioni per un’ora una o due volte a settimana, con relativi costi per il servizio. Non conosco il “prezzo” delle antenne ESA ma per darvi un’ordine di grandezza parliamo di qualche chiloeuro/giorno.
Gaia usa il delta-DOR perchè ha bisogno di una precisione di posizionamento estrema, ed è relativamente vicina alla Terra. A distanze molto grandi non c’è VLBI che tenga, e si naviga anche ‘a vista’.
Ricordo che New Horizons usò le immagini del telescopio LORRI per affinare il puntamento durante l’avvicinamento al sistema Plutone/Caronte. Si riprende il campo con il target, e si paragona la posizione rispetto alle stelle di fondo.
La stessa cosa veniva fatta per gli incontri ravvicinati delle Voyager; ogni foto ripresa veniva passata al team di navigazione, che paragonando inquadratura e stelle di fondo determinava i parametri di traiettoria. Inevitabilmente una manovra ha errori, e un fly-by con un pianeta ne ha parecchi, quindi la correzione era obbligatoria.
Bel thread 
E’ lo stesso: se, osservando le costellazioni, le vedi diverse, capisci che non sei più sulla Terra; se conosci la disposizione tridimensionale delle stelle nella galassia, da come ti compaiono le costellazioni puoi capire dove ti trovi; la domanda è: quanto cambiano le costellazioni (o meglio, le posizioni relative tra le stelle) da un punto all’altro del sistema solare? Considerando che la stella più vicina alla Terra si trova a 40 mila miliardi di chilometri di distanza (4 anni luce, alpha centauri), e che Marte è lontano 200 milioni di chilometri, le due distanze sono in rapporto 1: 2.000.000, quindi penso che le costellazioni sulla Terra e su Marte siano identiche, e quindi inutili per determinare la propria posizione.
Però un calcolo preciso sarebbe interessante.
A me sembra che questo metodo si basi invece proprio sulla misura della distanza; misurando il tempo di andata e ritorno dell’onda radio, ogni stazione determina la sua distanza dalla sorgente.
Però è una distanza che può essere in qualunque direzione, quindi è il raggio di una sfera.
Due stazioni, due sfere, che si intersecano in una circonferenza. Serve un’altra sfera/stazione per ridurre a due punti, e una quarta per ridurre a un punto:

Però è meno semplice di quello che sembra: anche i satelliti GPS funzionano in base a questo principio, ma se vai a leggerti l’algoritmo dettagliato, è piuttosto complicato.

Starei attento, a proposito di GPS, a non andare fuori strada, usando sistemi pensati per l’identificazione di un punto sulla superficie di un pianeta con la domanda originaria oggetto del Topic, che è un’altra, anche se ci sono dei punti in comune tra queste tecniche di localizzazione.
Rispetto al funzionamento dei sistemi di posizionamento globale puoi leggere l’ottimo articolo di @IK1ODO qui.
Eviterei invece di iniettare confusione come contributo a chi chiede invece una spiegazione, che così si ritrova con le idee ancora più nebulose.
Il punto è che per misurare posizione e velocità di una sonda in viaggio nello spazio esistono diverse tecniche, che restituiscono un dato più o meno preciso a seconda del contesto in cui si opera, come giustamente fatto rilevare dai post di @Vespiacic e @IK1ODO.
Cambiano poco. Con una base ampia quanto l’orbita terrestre, cioè 2ua, la parallasse della stella più vicina è inferiore a 0,003". Alcuni ordini di grandezza meno della risoluzione dei sensori stellari.
io stavo proprio cercando di ridurre la confusione: con un ricevitore radio puoi calcolare una distanza, non un angolo. Se poi di distanze ne misuri due o più, allora puoi calcolare un angolo.
Infatti proprio il link citato dice:
it measures the time difference between the arrival at two Earth-based antennas of a radio wavefront
[…]
Because the time difference measurements are precise to a few picoseconds, VLBI determines the relative positions of the antennas to a few millimeters