Si e’ ridotto a 4 siti il numero dei luoghi di touch-down che vengono presi in considerazione per la prossima missione esplorativa della superficie di Marte, ovvero Mars Science Laboratory.
Come sempre in questi casi, la scelta e’ il frutto di un delicato bilanciamento fra le esigenze dei responsabili di missione (che prediligono luoghi pianeggianti) e gli scienziati veri e propri (che invece vorrebbero esaminare valli e montagne per apprezzarne la stratificazione).
Tuttavia, le nuove potenzialita’ offerte dalla prossima sonda potranno rendere il dilemma meno stringente: il MSL sara’ in grado di effettuare correzioni alla rotta durante la discesa atmosferica, in risposta alle variazioni di pressione ed ai venti. In questo modo, il cerchio entro il quale tentare l’atterraggio si riduce da un diametro di 70 km (Spirit ed Opportunity) a soli 20 km.
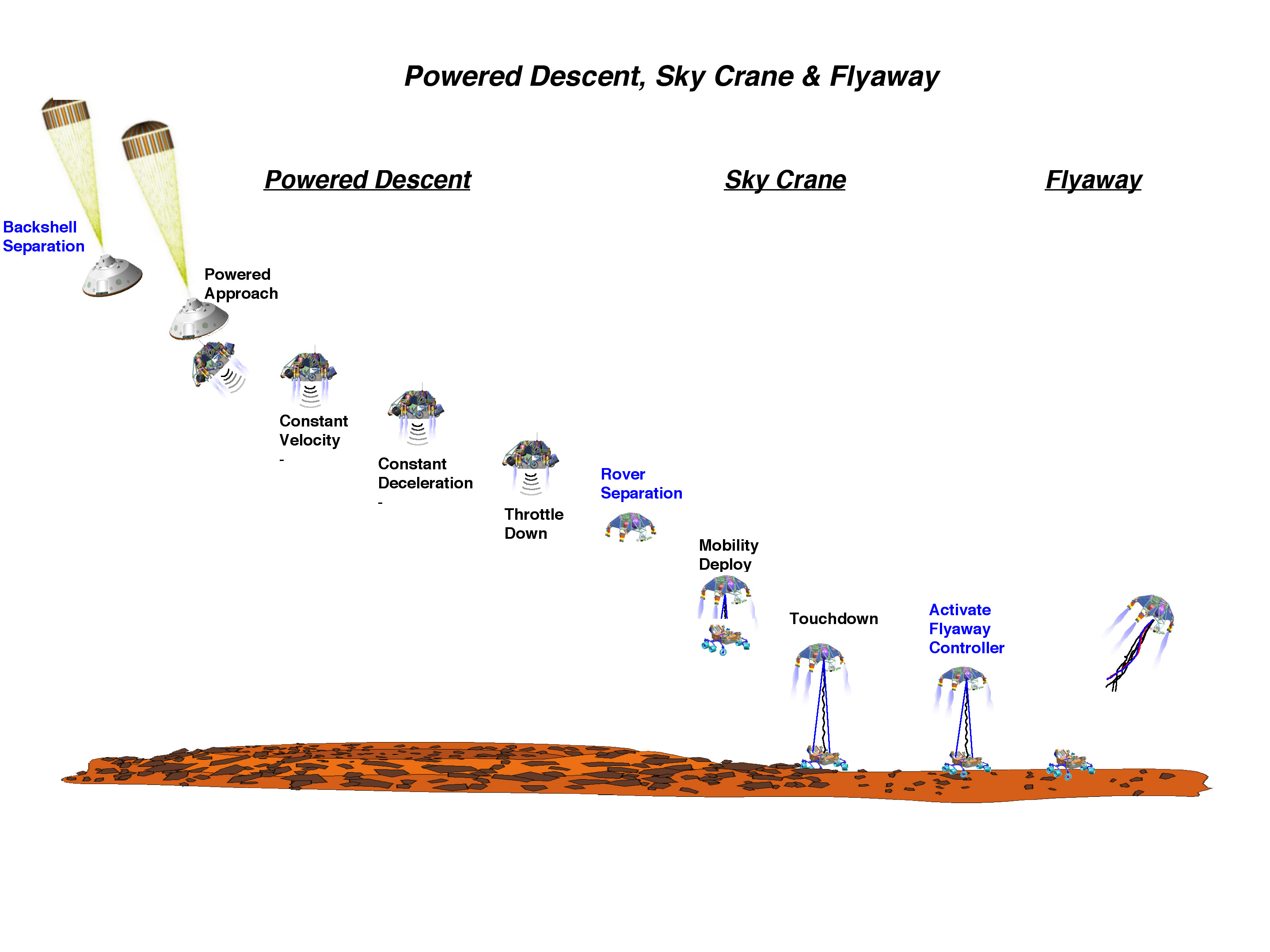
Inoltre verra’ sperimentato un nuovo sistema (detto “skycrane”, gru del cielo) per preservare il rover dall’impatto: in luogo dei noti airbags, il veicolo verra’ fatto discendere appeso ad un cavo collegato alla parte frenante della sonda, ancora sospesa in aria.
Piu’ importante ancora, il rover avra’ un’alimentazione a radioisotopi, e sara’ dunque in grado di essere operativo per un intero anno marziano (23 mesi), senza le limitazioni imposte dall’approvvigionamento a energia solare (tempo atmosferico, latitudini, zone in ombra etc.).
E veniamo ai quattro finalisti.
GALE e’ in zona equatoriale, e presenta un cratere che racchiude una montagna che consentirebbe al rover di risalire 5 km di stratificazioni successive, studiando la transizione da depositi argillosi del fondo a quelli sulfurei piu’ in alto. Gale era stato preso in considerazione per Spirit ed Opportunity, ma infine scartato in quanto giudicato troppo pericoloso per l’atterraggio.
EBERSWALDE presenta un fondo argilloso ove un antico fiume si gettava in un lago. Secondo gli esperti dell’industria petrolifera e’ il luogo ideale per cercare tracce di attivita’ chimica del carbonio, essenziale alla vita.
HOLDEN e’ caratterizzato dai sedimenti accumulati da una protratta e violenta attivita’ alluvionale: il rover dovrebbe esplorare il bordo di una vallata, per poi discendervi.
MAWRTH pare essere un canale alluvionale lungo il confine degli altopiani marziani. Presenta vari tipi di sedimenti argillosi e offre l’opportunita’ di studiare le variazioni intervenute nei climi umidi, Inoltre e’ l’unico dei 4 siti in cui l’obiettivo scientifico e’ all’interno della zona di atterraggio, e non nei pressi.
In primavera si terra’ il quarto dei convegni di valutazione dei siti. La scelta verra’ effettuata in estate, mentre il lancio di MSL e’ previsto per l’autunno 2009.

 da NASA JPL
da NASA JPL