Dietro il consiglio di @Raffaele_Di_Palma, apro questa discussione in merito alla varietà di standard di attracco presenti sulla Stazione Spaziale Internazionale, focalizzandomi maggiormente su quelli del segmento russo. L’intento è quello di fornire un quadro generale sui vari boccaporti e adattatori, senza però perdermi in tecnicismi eccessivi a beneficio della fruizione di tutti.
• Chiavistelli meccanici (latch): 12 • Diametro interno per il passaggio di persone e oggetti: 800 mm •Ingombro esterno massimo (diametro): 1.580 mm • Sistema di cattura morbido con collare basculante a tre petali •Sebbene siano la stessa cosa, alcuni elementi di APAS-89 sono stati modificati per rendere APAS-95 è una porta totalmente passiva
• Chiavistelli meccanici (latch): 8 • Diametro interno per il passaggio di persone e oggetti: 800 mm • Anche soprannominato drogue & cone system, ossia sistema sonda e cono, per via degli apparati sulla parte attiva (sonda) e cono (passiva) • Cono fisso integrato nel portello interno
Sojuz, Progress, ATV, Rassvet Zvezda, Poisk
SSVP-M8000
Connessione tra moduli
• Chiavistelli meccanici (latch):12 • Diametro interno per il passaggio di persone e oggetti ~1.000 mm • Soluzione ibrida tra gli standard SSVP-G4000 e APAS-89/95, dotata di cono e 12 chiavistelli meccanici • Cono removibile/applicabile alla struttura del portello interno
Zvezda, Nauka, Poisk
Common Berthing Mechanism - CBM
Connessione di moduli
• Chiavistelli meccanici (latch): 16 • Passaggio interno per persone e oggetti: ~1.270 mm •Ingombro esterno massimo (diametro): 1.900 mm
Moduli e componenti connessi al segmento statunitense, Cargo Dragon v.1, Cygnus, HTV, Dream Chaser
NASA Docking System - NDS
Aggancio di navette ad un modulo
• Chiavistelli meccanici (latch): 8 • Diametro interno per il passaggio di persone e oggetti: 800 mm • Collare basculante per l’aggancio morbido a tre petali
Identifica un boccaporto che può essere dotato di un’interfaccia removibile per adattare in orbita una porta SSVP-M8000 per l’attracco di veicoli (SSVP-G4000)
Nauka e Pričal
Pressurized Mating Adapter - PMA
Commuta una porta di tipo CBM in una APAS-95
Unity e Harmony
International Docking Adapter - IDA
Spesso connesso ad un PMA, trasforma una porta di tipo APAS-95 per attracco di veicoli che adottano lo standard NDS \ Harmony
Le porte del segmento russo
Zarja: 3
APAS-89/95 attiva → CBM passiva (anteriore, verso PMA-1 e Nodo-1)
SSVP-G4000 passiva (inferiore, verso Rassvet)
SSVP-M8000 attiva (posteriore, verso Zvezda)
Rassvet: 2
SSVP-G4000 passiva (inferiore, ormeggio Sojuz e Progress)
SSVP-G4000 attiva (superiore, verso Zarja)
Zvezda: 4
SSVP-G4000 passiva (posteriore, ormeggio Sojuz e Progress)
SSVP-M8000 passiva (anteriore, verso Zarja)
SSVP-M8000 passiva (inferiore, verso Nauka/Pirs)
SSVP-M8000 passiva (superiore, verso Poisk)
Nauka: 2+1
SSVP-M8000 attiva (superiore, verso Zvezda)
SSPA-GM passiva (inferiore, verso Pričal) con adattatore removibile SSVP-M8000 → G4000
APAS-89/95[4] attiva modificata (anteriore, verso camera di equilibrio per esperimenti)
Poisk/Pirs: 2
SSVP-M8000 attiva (inferiore/superiore, verso Zvezda)
SSVP-G4000 passiva (superiore/inferiore, ormeggio Sojuz e Progress)
Pričal: 6
SSVP-M8000 attiva (superiore, verso Nauka)
SSPA-GM ibrida passiva (inferiore, ormeggio di Sojuz e Progress e opzionalmente di moduli) con adattatore removibile SSVP-M8000 → G4000
4x SSPA-GB1/2[5] - di base è SSVP-M8000 - passive (laterali, ormeggio di moduli e opzionalmente di veicoli) sprovviste ad oggi di adattatori
Immagini
Sistema SSVP-G4000 attivo della Sojuz MS-15, al centro la sonda nera per la cattura morbida. Fonte: NASA Johnson via Flickr
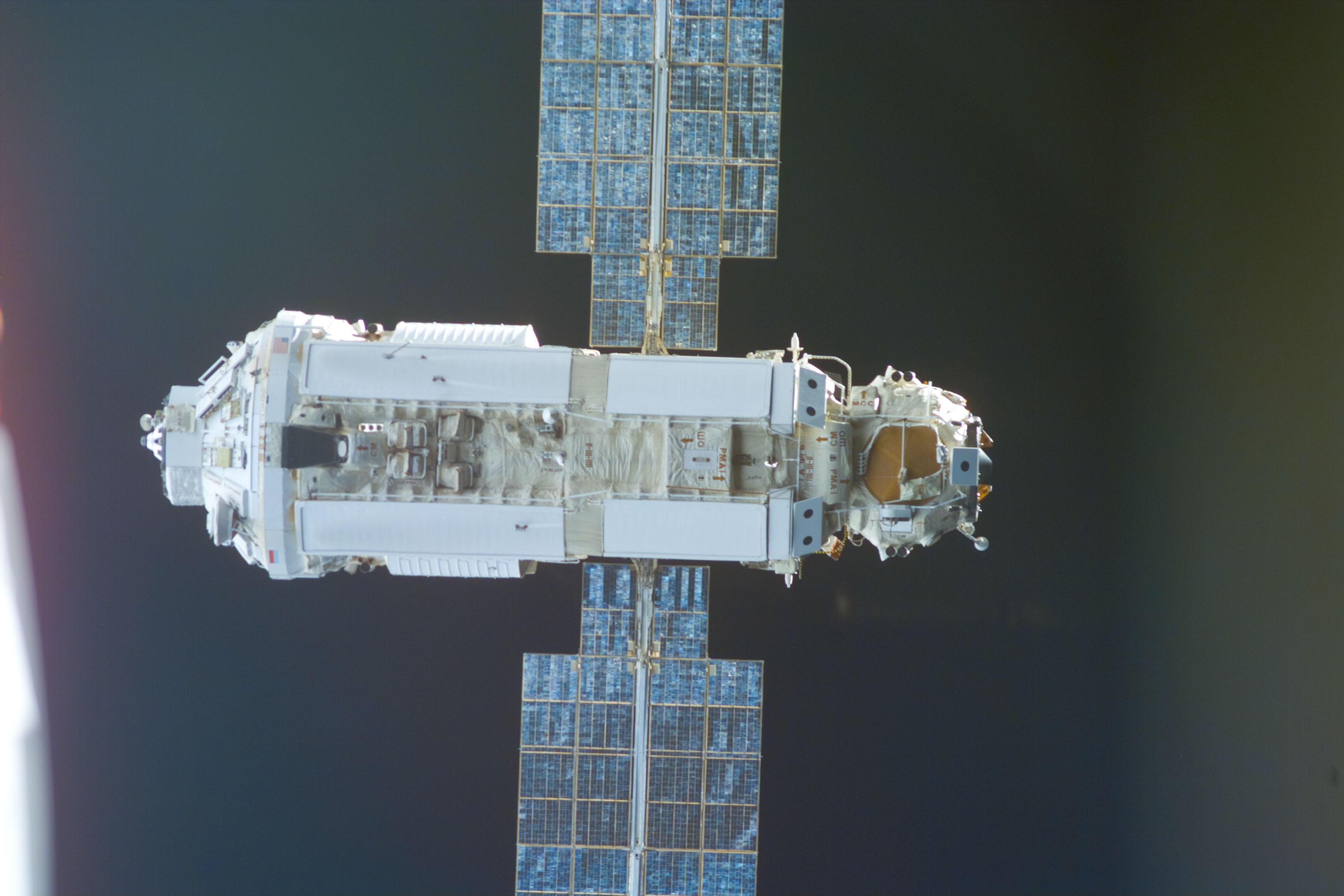
Il modulo Zarja il 6 dicembre 1998 ripreso dallo Space Shuttle Endeavour. A sinistra si intravede la porta SSVP-M8000 attiva, a destra il collare con tre petali di quella APAS-89/95. Fonte: NASA Image Library
Dall’inglese Androgynous Peripheral Attach System, ossia Sistema per l’attracco periferico androgino↩︎
Dal russo Sistema Stykovki i Vnutrennego Perechoda (Система стыковки и внутреннего перехода), ossia Sistema per l’attracco e il trasferimento interno. ↩︎
Dal russo Sistema Stykovki Passivnaja Adaptiruemaja - Gibridnaja Modificiruemaja (Система Стыковки Пассивная Адаптируемая - Гибридная Модифицируемая), ossia Sistema di attracco passivo adattabile - ibrido modificabile↩︎
Roskosmos non ha reso il nome esatto dello standard di aggancio. Tuttavia la camera di equilibrio presenta un anello esterno con 12 chiavistelli meccanici come APAS-89/95, ma a differenza di essa un collare fisso, non basculante, con quattro petali anziché tre. ↩︎
Dal russo Sistema Stykovki Passivnaja Adaptiruemaja - Gibridnaja Bokovych (Система Стыковки Пассивная Адаптируемая - Гибридная Боковых), ossia Sistema di attracco passivo adattabile - ibrido laterale. Roskosmos identifica in questo modo le porte radiali di Pričal distinguendo due casi: disposte lungo la direzione del moto (2) oppure perpendicolari ad essa (1). ↩︎
Aggiungerei che il CBM ha due configurazioni : passiva (PCBM) e attiva (ACBM).
Ad esempio i nodi hanno 4 porte radiali e 1 assiale ACBM e 1 assiale PCBM.
Inoltre l’hatch, e quindi il passaggio interno, viene in due misure : versione Boeing da 50" (1270mm) e versione TAS da 37,4" (950mm). Il primo usato su Nodi, Columbus, MPLM/PMM ed il secondo su Cygnus PCM.
Grazie per le dritte @furdisufit. Francamente non ero a conoscenza di questa differenza e nelle ricerche fatte sul web avevo avuto difficoltà a trovare le misure “standard”, figuriamoci la particolarità di Cygnus. A dire il vero, forse perché ho cercato meglio, un articolo di spaceflight101 lo dice:
Cygnus è l’unico veicolo di rifornimento che monta un portello più “stretto” mentre Cargo Dragon v.1 e HTV quella “normale” da 1.270 mm, giusto Antonio? Ciò era dovuto alla necessità di installare nell’apertura il dispiegatore di CubeSat da rilasciare in orbita nella missione secondaria di Cygnus?
In tutto questo non sapevo che HTV fosse il solo a trasportare gli armadietti (International Standard Payload Rack), talmente grandi da passare esclusivamente attraverso una porta CBM. Per chi non lo sapesse un ISPR è alto 2.000 mm, largo 1.050 mm e profondo 860 mm circa.
Chiunque avesse dei riferimenti (link a fonti ufficiali, documenti, etc.) relativi all’argomento della discussione è caldamente invitato a condividerli/segnalarli qui sotto
Stranamente si, dismessi gli MPLM questa capacità è stata mantenuta solo da HTV, infatti EDR2 ha volato sulla ISS dal Giappone…
Inoltre: AxH1 sarà il prossimo modulo ad avere dinuovo gli hatch da 50", e Nanoracks Bishop è l’unico modulo che ha il PCBM ma non è provvisto di hatch.
La necessità di avere un hatch da 37,4" su Cygnus non penso sia quella di avere i dispenser di cubesat : probabilmente visto che il modulo PCM ha un diametro di 2,8m lo spazio interno è ridotto e non può essere montato l’hatch da 50" perché non si aprirebbe completamente.
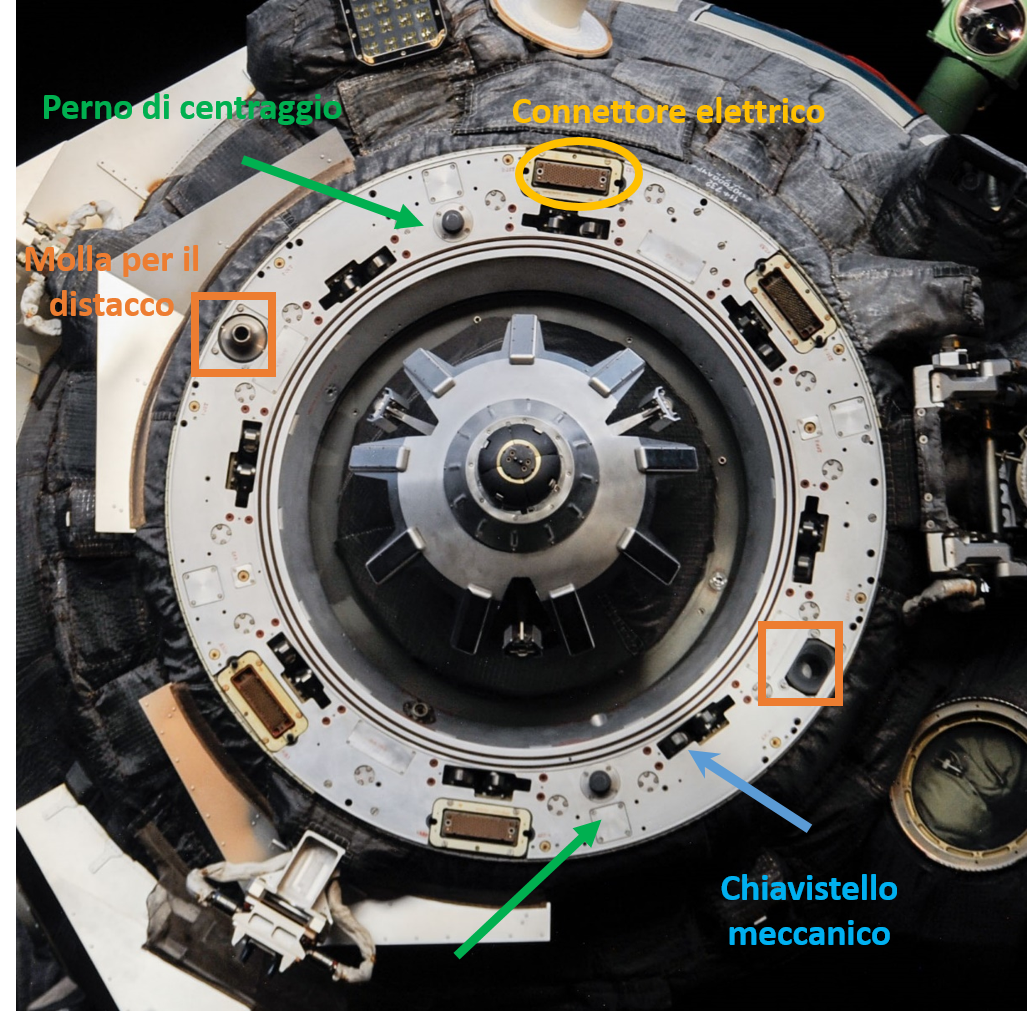
Sotto lente d’ingrandimento la parte attiva del sistema di attracco SSVP-G4000 presente sui veicoli adibiti al trasporto di equipaggio (Sojuz) e di merci (Progress e ATV). Avendo lo stesso standard non stupisce il fatto che sono praticamente identici, eccezion fatta di due connettori per il trasferimento del propellenti stoccati nei serbatoi Progress/ATV alle cisterne della Stazione. In entrambi i casi ci sono:
Due molle che spingono indietro il veicolo al momento del distacco
Due perni per il centraggio tra la parte attiva e quella passiva del sistema di attracco
Quattro connettori per il trasferimento di dati e di elettrica
Otto chiavistelli per l’aggancio forte tra il veicolo e la Stazione
Ciao @chiragp87233561 e benvenuto a bordo. Prima di rispondere alla tua domanda, ti è chiara la distinzione tra porta di attracco passiva e attiva (passive/active docking port)? È una convenzione internazionale scelta in relazione al ruolo assunto dal generico veicolo spaziale (modulo, capsula, telescopio, struttura) nel processo di rendezvous e attracco. Idealmente chi è l’obiettivo (target spacecraft) è detto passivo poiché resta in attesa del contatto, mentre la navicella/oggetto che insegue (chaser spacecraft), che si avvicina sempre di più e che interviene in modo dinamico sul suo moto, è detto attivo.
Per discorso appena fatto, ciascuna porta ha un lato attivo e uno passivo. Vedi ad esempio Rassvet che è provvisto di due SSVP-G4000: una attiva per interfacciarsi con Zarja e una passiva per connettersi con le Sojuz e le Progress. Che si tratti di attracco automatico - docking - o di attracco assistito - berthing - con un braccio robotico la distinzione è sempre valida. Tale classificazione (active/passive) deriva anche dal fatto che le famiglie di porte di attracco si classificano come androgynous (androgino) e non-androgynous (non androgino).
Non so darti una risposta certa a questa domanda, perché non possiedo documenti da fonti ufficiali. Ciò ti sto per dire sono mie ipotesi quanto più possibili vicine alla realtà. Penso che nell’evoluzione da SSVP-M8000 a SSPA-GM/SSPA-GB gli ingegneri abbiano fatto modifiche profonde allo standard di attracco originale per renderlo “ibrido”. Ho come l’impressione che la novità non sia esclusivamente nel rivoluzionario anello adattatore removibile, ma che ciò abbia richiesto interventi specifici alla porta originale.
Questo per dirti che ho il presentimento che non tutte SSVP-M8000 preesistenti possono essere convertite in orbita. Per inciso, ad oggi sulla ISS non c’è nessuna porta di attracco “M8000” libera (ad eccezione di Pričal).
Se non sono stato chiaro in alcune frasi, contattami che proverò a spiegarmi meglio @Raffaele_Di_Palma posso contare su di te, amico mio?
Ho una grande conoscenza del sistema di aggancio attivo e passivo (originariamente sono stato io a sollevare questa pagina di discussione tramite (@Raffaele_Di_Palma)). Grazie per la tua risposta. Pensavo che questo SSPA-GB 1/2 fosse un nuovo nome ma è mi sembra un’evoluzione del veicolo spaziale del progresso (sappiamo già che SSVP-M8000 è un prodotto incrociato ibrido di APAS-89/95 e SSVP-G4000 quindi, stavo pensando a cosa gli è valso un nome, ibrido di un ibrido)
Se osservi le fotografie di Pričal puoi notare che le porte radiali hanno un rivestimento protettivo bianco con stampigliato sopra in caratteri cirillici l’acronimo dello standard di attracco: ССПА-ГБ1 (SSPA-GB1) e ССПА-ГБ2 (SSPA-GB2). Per quanto ne so, supposizioni personali senza conferma, non dovrebbero esserci con il tipo SSPA-GM montato nel boccaporto di nadir di Nauka perché, ad eccezione dell’ultima lettera, la sigla ha lo stesso significato (Sistema di attracco passivo adattabile - ibrido).
Sicuramente gli ingegneri russi avranno voluto fare una distinzione, essendo le quattro porte di Pričal disposte in modo radiale, sfalsate di 90° l’una dall’altra. Infatti il carattere “Б” ha il significato di laterale/radiale, mentre “М” di modificabile. Può essere dovuto alla presenza fin dall’inizio su Nauka dell’anello adattatore, interfaccia non presente sul nodo Pričal? Ripeto, a parte sfumature semplicemente semantiche, le porte SSPA-GB e SSPA-GM dovrebbero essere equivalenti a livello funzionale e costruttivo.